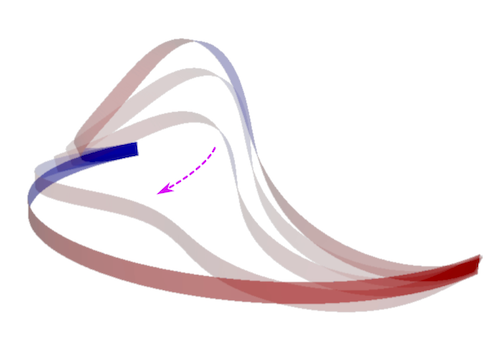
スナップ座屈のように薄い構造物の動的機能の新たな道筋を探求しています。
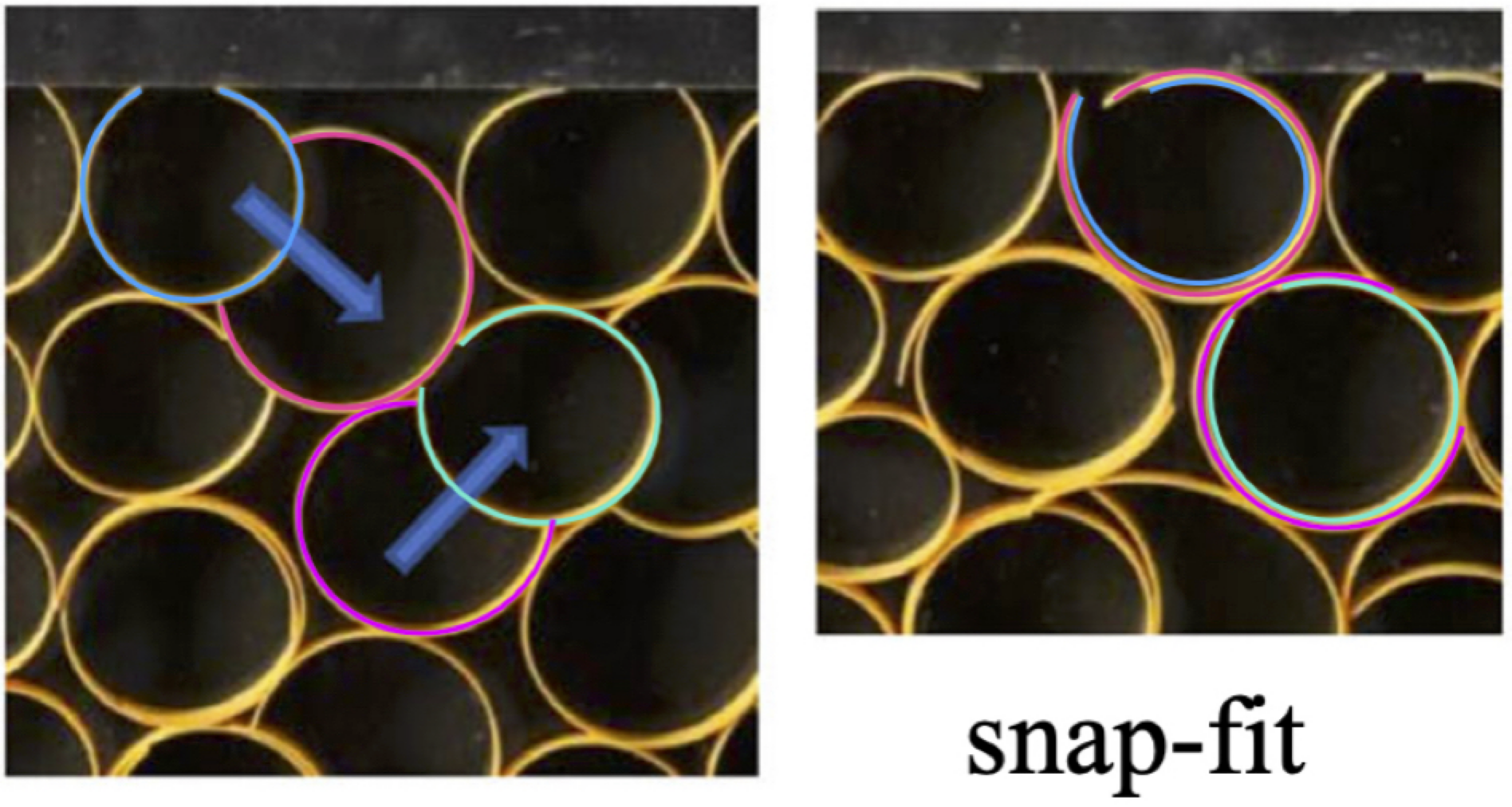
自然や身の回りに着想を得た新奇な構造の変形を研究しています.
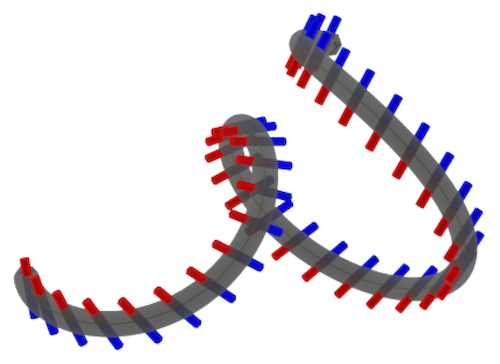
ソフトロボットの基本的な性質について研究しています.
実験に裏付けられたシミュレーションと理論を組み合わせて研究を展開します.